
Automatic Boom Height Systems for Ensured Consistency
Consistent boom height is important to combating weed resistance for three reasons: to reduce uneven spray dispersion if the boom is too low, to reduce spray droplet drift if the boom is too high and to reduce damage to the boom or crop if the boom is on uneven terrain.

In 1947, Ray Hagie, founder of Hagie Manufacturing, invented the first self-propelled sprayer. Today, self-propelled sprayers make up the majority of the farm spraying market, and this equipment has revolutionized the way farmers and applicators apply pesticides, herbicides and fertilizers. The booms have nozzles to distribute the chemicals or fertilizer. Ideally, each nozzle will maintain a constant distance to the target spray area, but the height of the boom changes due to differences in terrain and crop height as well as the roll angle of the sprayer. Consistent boom height is important to combating weed resistance for three reasons: to reduce uneven spray dispersion if the boom is too low, to reduce spray droplet drift if the boom is too high and to reduce damage to the boom or crop if the boom is on uneven terrain. In the current generation of automatic boom height control systems, ultrasonic sensors and radar sensors are often used to measure distance of the boom from the target area. The sensors’ measurements provide feedback for a control system that actively adjusts the boom to minimize deviation from an operator-specified target boom height.
Automatic Boom Height Control Reduces Variability and Achieves Accuracy
Automatic boom height control systems reduce the variability in boom height which is important for three key reasons.
- First, if the boom height is lower than the target, uneven spray dispersion can occur. A lower boom will prevent proper overlap or even cause a complete lack of application. These cases are problematic because weeds can develop resistance to herbicides when they receive sublethal doses. In the area directly under the nozzle, severe overapplication can occur, which results in wasted product and is environmentally harmful to the crop.
- Second, as the height of the boom increases, droplet drift can increase. This results in application to an area that was not intended to be treated.
- Third, if the boom height is too low, damage to the boom or to the crop could occur.
All three of these potential scenarios reduce efficacy of the products being applied, further increasing the potential for weed resistance.
Comparing Available Boom Control Systems
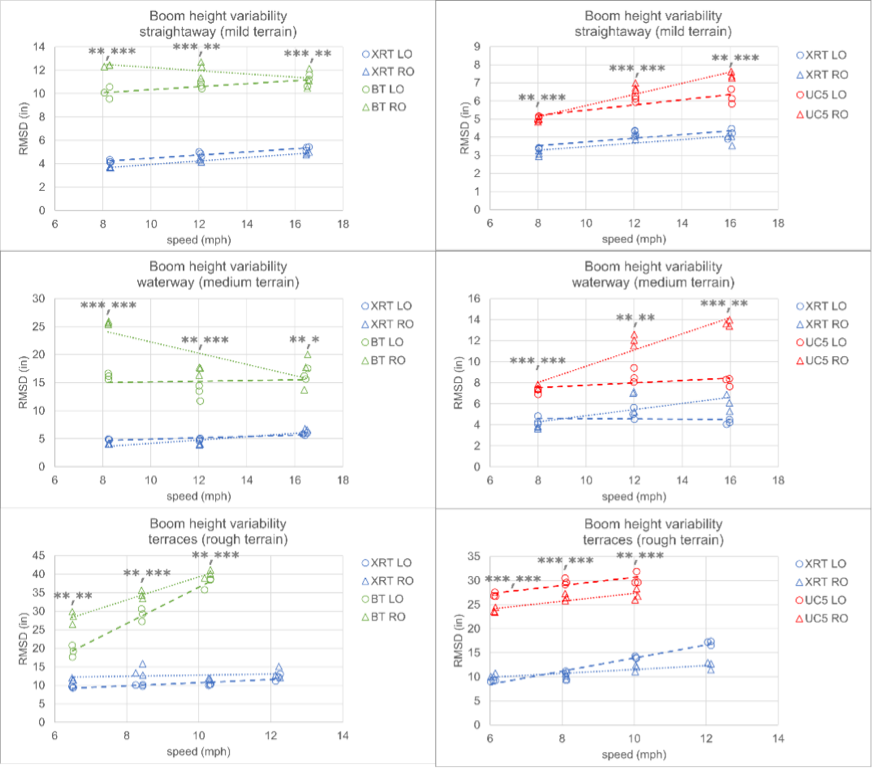
In a recent competitive analysis published in an American Society of Agricultural and Biological Engineers journal, the boom leveling performance of three automatic boom height systems was compared. The comparison of the three systems was performed with two sprayers on three different types of terrain at three different speeds. System A, System B, and System C were put to the test on three different terrains: a straightaway, a waterway, and terraces. They were also tested using at least three different speeds: 8, 12, and 16 mph on the straightaway and waterway applications, and 6, 8, and 10 mph on terraces. The target height was set at 40 inches to protect the booms from impact and maintain the desired level above the crop to maximize effectiveness of the application and consistency of the spray pattern.

{kind=link}
What the study found was that System B (Raven AutoBoom® XRT) holds the boom closer to the target height with less variability.
Radar sensors allow the XRT system to take measurements roughly twice as fast as an ultrasound sensor Another contributing factor is this system’s ability to measure inputs like boom heights, the roll of the chassis, and center rack rotation. That information is used to quickly make adjustments to the booms, keeping them closer to the target with less variability. This means the sprayer will provide better dispersion consistency, reduce spray droplet drift and reduce boom and crop damage.
Download the full study
Burgers, T., Gaard, J., Hyronimus, B. (2021). Comparison of Three Commercial Automatic Boom Height Systems for Agricultural Sprayers. Applied Engineering in Agriculture, 37(2): 287-298.
Related Articles
of